S.A.R.D
Surveillance And Reconnaissance Drone
Project Overview
Tactical quadcopter for surveillance and reconnaissance operations
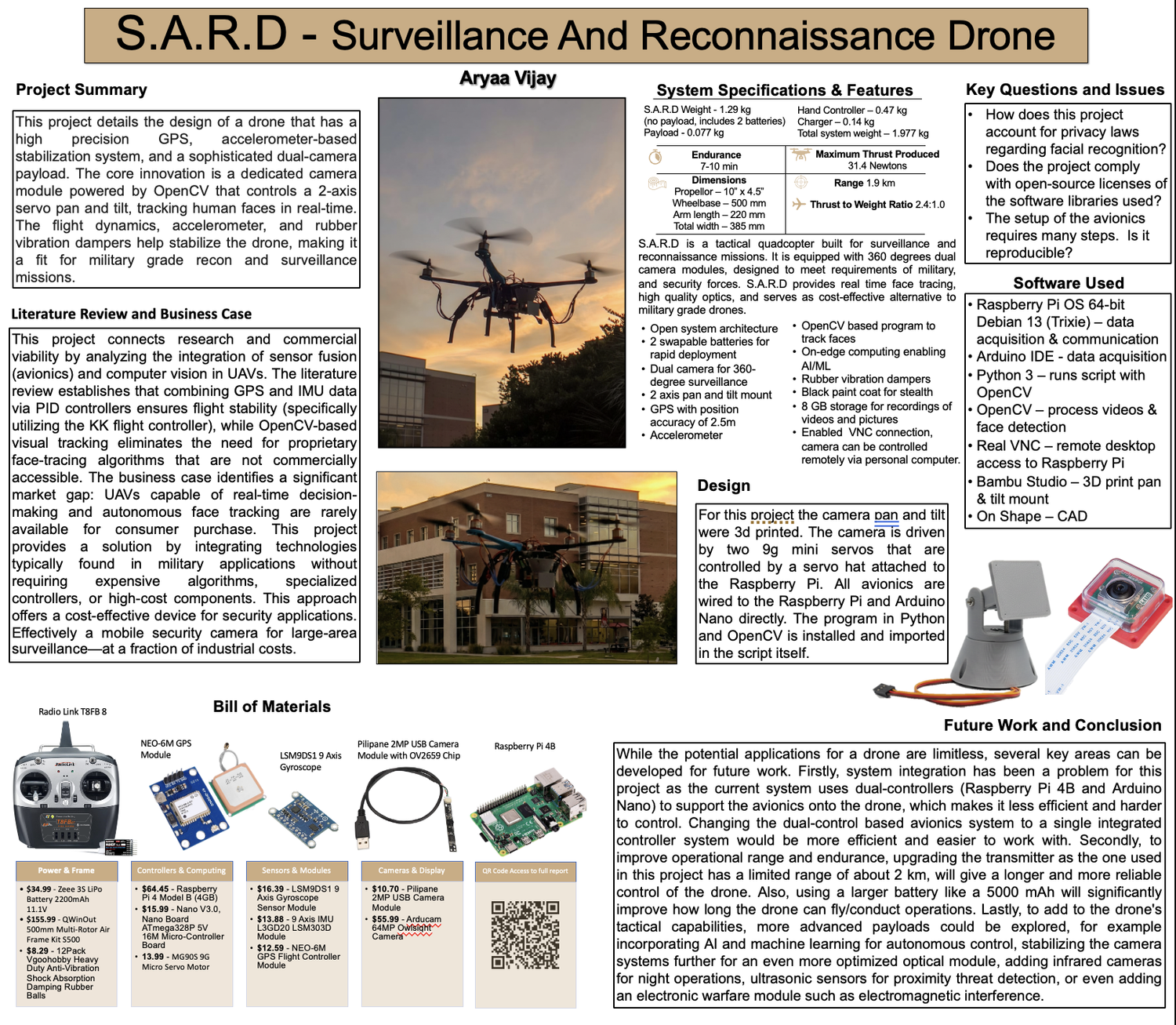
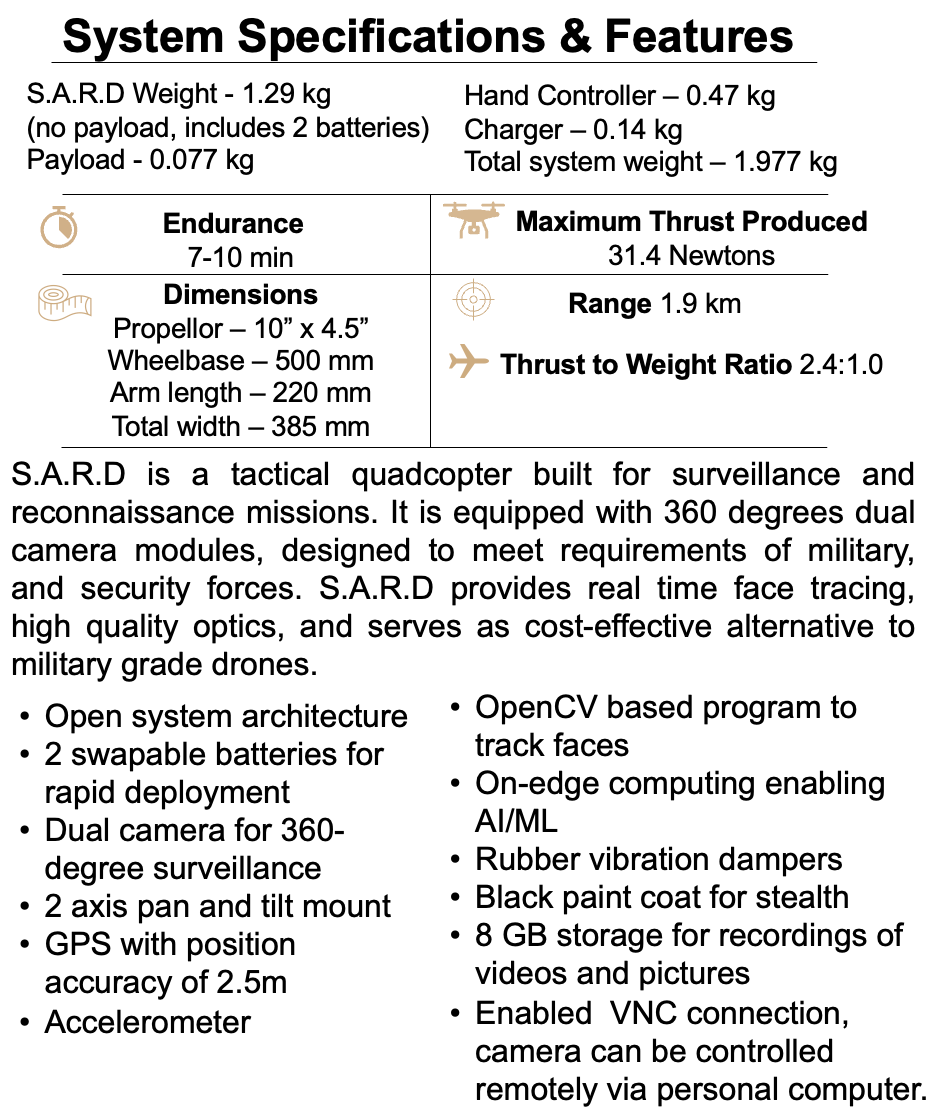
S.A.R.D is a tactical quadcopter designed for surveillance and reconnaissance missions, engineered to meet operational requirements of military and security forces. The platform provides real-time target tracking, high-resolution optics, and serves as a cost-effective alternative to military-grade UAV systems.
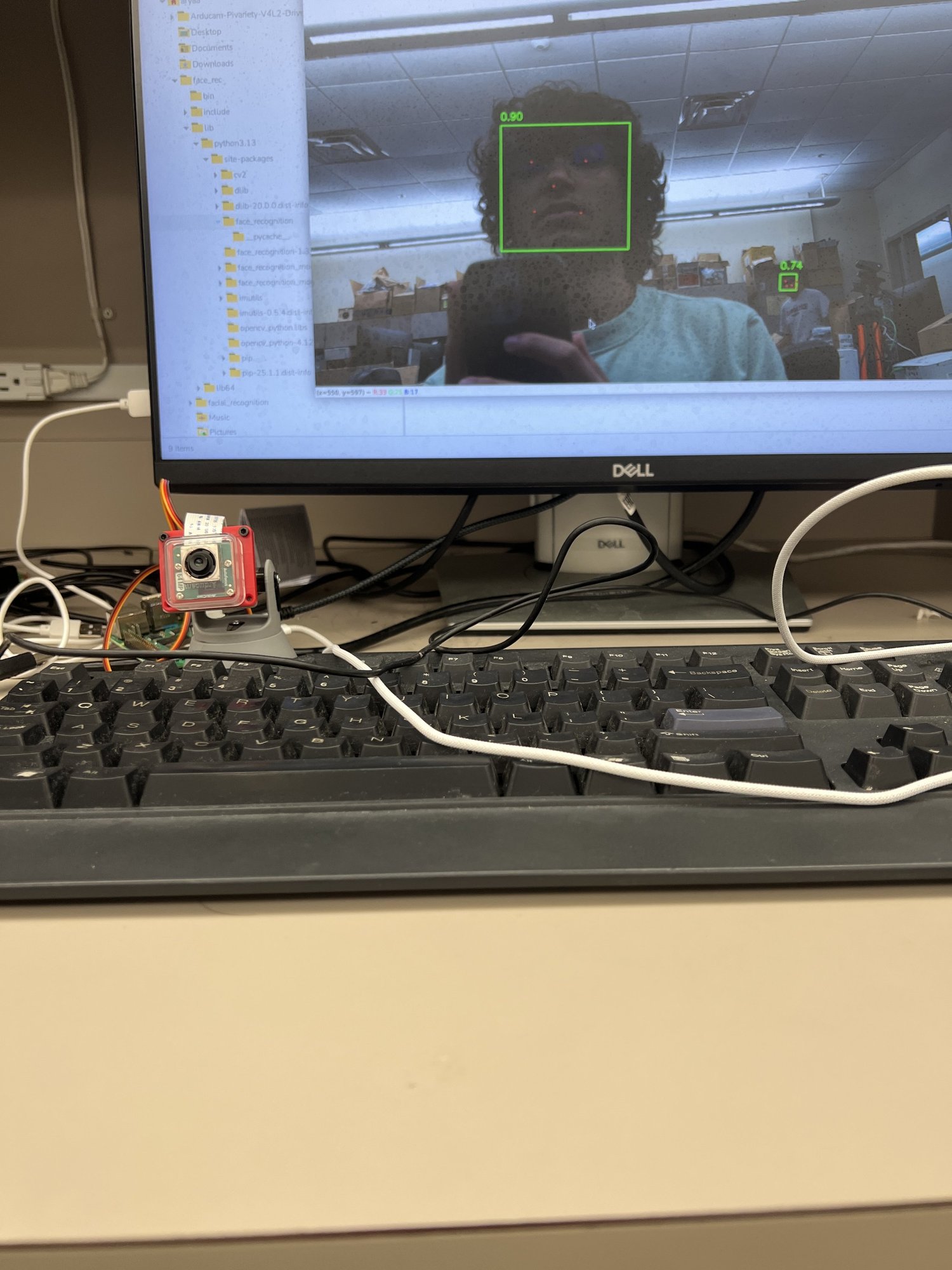
The system integrates GPS navigation, a 360-degree dual camera module, and facial recognition algorithms powered by YuNet Deep Neural Network. This configuration enables real-time target identification with detection of approximately 100 faces per frame and high-precision recognition at 2-meter range, with wide-area aerial reconnaissance capabilities extending to 50 meters.
Architected with open system design principles, S.A.R.D features rapid battery swap capability, dual-camera surveillance coverage, on-edge AI/ML processing, vibration-dampening hardware, and 8GB storage for mission data recording. Total development cost maintained at $476, demonstrating force multiplication through accessible technology.
IMU Sensor Fusion Demo
Real-time Kalman filter simulation with 3D drone orientation, live telemetry plots, and noise rejection analysis
Build Process
Complete development cycle from concept to deployment
Design & Planning
Initial system architecture design, component selection, and mission requirements definition. Conducted feasibility analysis for integrating AI-powered facial recognition with quadcopter platform.
Parts Procurement
Ordered all hardware components totaling $476, including airframe, motors, flight controller, computing modules, sensors, and camera systems.
Hardware Integration
Physical assembly of airframe, motor mounts, flight controller installation, and initial power distribution. 3D-printed custom pan-tilt mount for camera gimbal system.
PID Controller Tuning
Configured PID gains for flight stabilization through KK2.1.5 interface. Tuned proportional, integral, and derivative parameters for stable hover and responsive control.
Flight Controller Testing
Conducted ground tests and initial flight tests to validate flight controller performance, motor response, and overall system stability.
Arduino IMU & GPS Programming
Developed C++ firmware for Arduino Uno to interface with LSM9DS1 9-axis IMU and NEO-6M GPS module. Implemented I2C communication protocols and data parsing algorithms.
AI Camera Programming
Implemented YuNet Deep Neural Network on Raspberry Pi 4B for real-time facial detection and tracking. Developed Python interface using OpenCV for camera input and computer vision processing.
Sensor Data Collection
Collected flight data from IMU, GPS, and camera systems during test flights. Logged telemetry data for post-flight analysis and algorithm refinement.
Kalman Filter Implementation
Implemented Kalman filter algorithm in Python to process noisy IMU sensor data. Fused accelerometer, gyroscope, and magnetometer readings for improved attitude estimation.
Integration & Testing
Final system integration, comprehensive testing, and demonstration at Florida Tech Engineering Showcase. Validated all subsystems working cohesively.
System Capabilities
Operational features and technical achievements
Neural Target Tracking
Real-time facial recognition using YuNet Deep Neural Network on 64MP Arducam sensor. Detection of ~100 targets per frame with high-precision identification at 2m and wide-area reconnaissance to 50m range.
Dual-Controller Architecture
Integrated avionics suite: KK2.1.5 flight controller for stabilization, Arduino Uno for sensor data acquisition (9-Axis IMU, GPS), Raspberry Pi 4B for image processing and servo control of pan-tilt mechanism.
360° Surveillance System
Custom-designed pan-tilt camera assembly with 2-axis servo control for continuous target tracking. CAD-modeled and 3D-printed OnShape assembly with integrated micro-servo mounts and Arducam housing.
Optimized Flight Performance
PID controller tuning via GPIO interface. IMU calibration with Kalman filter achieving 7–10 minute flight endurance, 2.4:1 thrust-to-weight ratio, GPS accuracy of 2.5m CEP.
Technical Parameters
Performance metrics and operational limits
Video Documentation
Operational demonstrations of facial tracking, IMU hardware, and dashboard interface
YuNet neural network performing real-time facial detection and servo-driven tracking via pan-tilt assembly
LSM9DS1 9-axis IMU hardware integration with Arduino Uno and real-time I2C data acquisition
Real-time telemetry dashboard with 3D drone visualization, Kalman-filtered orientation, and live sensor plots
Project Gallery
Development, testing, and operational demonstration


Skills Demonstrated
Engineering disciplines and technologies applied
System Components
Complete hardware breakdown and cost analysis